Because we know so little about the geometry of the Lost City Field (e.g. How big it is?, How many structures are there?, Where are the faults and fissures etc?) a very important component of our program will be to use the Autonomous Benthic Explorer (ABE) to map the area in detail. This free-swimming underwater vehicle (AUV) is extremely well suited for the job. For our mission, it is equipped with a special sonar system called the SM2000, which will provide an extremely detailed topographic map of Lost City. This sophisticated echo sounder sends
out an acoustic signal at 200kHz with a swath width of 120 to 150°, allowing broad regions of the field to be mapped in a single pass. On this mission we hope to obtain a detailed map of the field at a resolution of < 5 m or better.
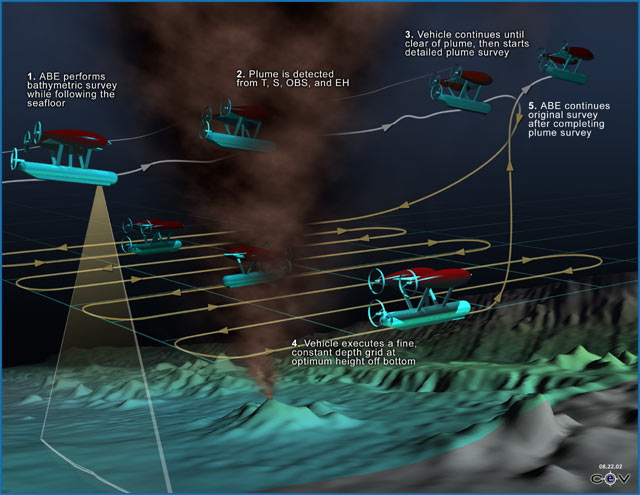
ABE is a very smart vehicle that can be preprogrammed to “fly” overlapping survey lines at a constant altitude above the seafloor. It drives through the water using a series of thrusters that allow it to go up and over ridges, maneuver in any direction, and its onboard intelligence system allows it to maintain it’s height above bottom even when in vigorous updrafts caused by intense hydrothermal plumes. At the same time that ABE is collecting information about the topography of the seafloor, it can also collect information on the chemistry and temperature of the water that it is flying through, information on the magnetic properties of the rocks that it is flying over, and it can take photographic images of the seafloor.
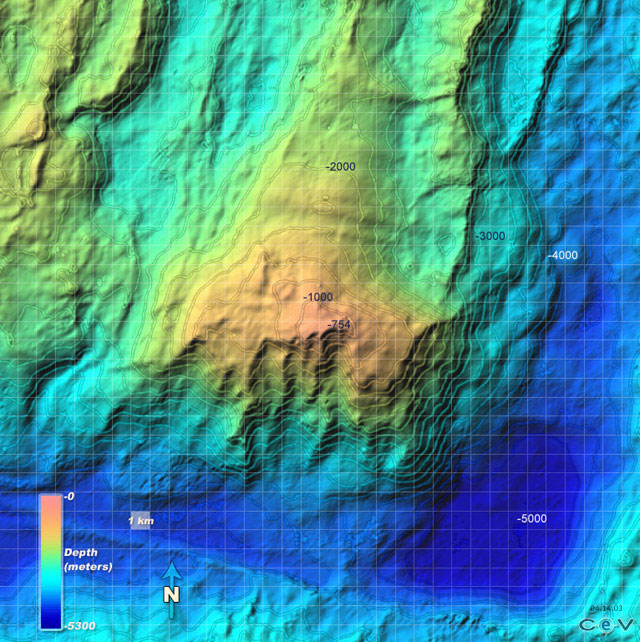
Lost City in Detail: Based on regional scale maps, we will lay out a series of parallel survey or track lines such that they cover the area we believe the field to be in. The spacing between the track lines is calculated so that the swath width, or foot print of the acoustic signal, overlaps a bit with the previous track. In this way, the bathymetry of the seafloor can be 100% covered. We will program ABE to follow these lines at a specific water depth—to always fly above the bottom at a specific height even if the bottom has valleys, hills, or pinnacles. We will likely choose an altitude of 100 m (~300 feet) above the seafloor for the first “flyovers” so that we are sure to stay well clear of the tops of the pinnacles. Before putting ABE in the water, however, we must set out a series of navigation beacons so that ABE can tell where it is on the mountain. We do this by setting out a series of acoustic transponders that are moored on the seafloor at the summit of the Atlantis mountain and along the sides of the mountain. The transponders, combined with an accurate knowledge of where the ship is, which is based on information from satellites within the Global Positioning System network, provide a way to determine very accurately where ABE is beneath the surface of the ocean.
If all goes well, we will use ABE almost every night during the cruise after Alvin comes out of the water. ABE will provide critical road maps that will help when we are diving in the field with Alvin. Because the topography of the mountain is so steep, without these maps it will be very difficult for us to know where all the chimneys are and to effectively move around the field with Alvin—remember that there is no sunlight near the seafloor and light from Alvin does not travel far through the water. Think about what it would be like to be in the middle of a forest at night with 100-200 foot trees surrounding you. If you only had a few flashlights, and did not know where the trees were, it would be very difficult to find your way around and to map out all the trees. We will also use ABE as a smart explorer, with the hope that we may find new sites of venting on the mountain and adjacent mountains. Perhaps someday there will be fleets of similar vehicles exploring Earths oceans.